科 系:|人工智能系|

学历职称:博士研究生、教授
导 师:博士/硕士研究生导师
联系方式:gdongsh2022@hainanu.edu.cn
基本情况:
郭东生,教授,博导/硕导,海南省自由贸易港拔尖人才(D类),入选斯坦福大学全球前2%顶尖科学家榜单,获“海南大学创新创业教育工作优秀个人”和“海南大学优秀本科生学业导师”称号;长期致力于智能机器人、神经网络以及人机交互方面的教学科研工作,获海南省自然科学奖二等奖(2025),中国商业联合会服务业科技创新奖一等奖(2025),国际学术会议(CSIS-IAC 2024,ICVISP 2024,RCAE 2023)最佳论文奖。
通讯地址:海南大学信息与通信工程学院信息科技大楼411室
学习和工作经历:
2022年11月-至今 海南大学信息与通信工程学院 教授
2025年9月-至今 海南大学本科生院教育数字化中心主任(挂职)
2025年7月-至今 全球校园人工智能算法精英大赛海南省组委会秘书长
2025年3月-至今 《Biomimetic Intelligence and Robotics》 青年编委
2024年12月-至今 《海南大学学报(自然科学版)》 青年编委
2015年7月至2022年10月 华侨大学信息科学与工程学院 副教授
2018年9月-2019年9月 新加坡国立大学电子与计算机工程系 访问学者
2006年9月-2015年6月 中山大学信息科学与技术学院 本、硕、博
博士招生专业:信息与通信工程、电子信息、人工智能
硕士招生专业:信息与通信工程、电子信息、人工智能
优先考虑有机器人、无人机、大模型理论研究和工程实践经历的同学
研究方向:
[1] 机器人技术:双臂机器人、移动机器人、四足机器人、水下机器人、飞行机器人
[2] 人工智能技术:多模态大模型、深度强化学习、机器视觉、递归神经网络
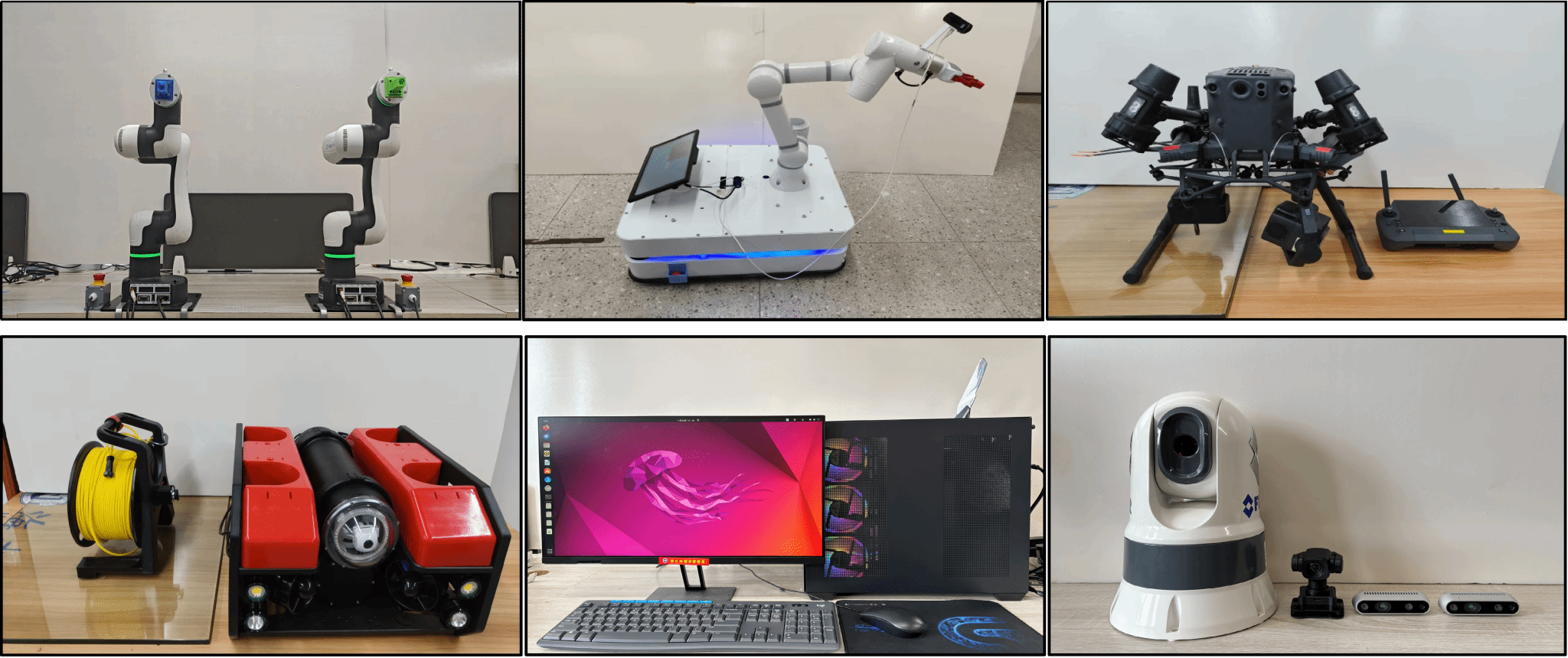
课题组现有的机器人平台(含固定机械臂、移动机械臂、无人机、水下机器人等)
主持或参与科研项目:
[1] 2025年-2028年,主持国家自然学基金项目地区项目,复杂动态环境下移动机械臂协调运动规划技术研究
[2] 2025年-2027年,主持海南省国际科技合作研发项目,面向海洋沉船遗迹考古的水下目标三维重建关键技术
[3] 2022年-2027年,主持海南大学高层次人才科研启动项目,关节受约束下冗余机器人高精度运动规划技术
[4] 2024年-2027年,参与海南省重点研发项目,面向海上高精度监测的无人载运平台关键技术与系统开发
[5] 2026年-2028年,参与海南省黎安教育科技创新联合项目(重点研发),面向海洋水域智能监测的水下机器人系统关键技术研究
[6] 2025年-2028年,参与海垦集团科技创新“揭榜挂帅”项目,荔枝新型种植模式与自动采摘机器人关键技术研发
代表性学术成果:
[1] Simultaneous target tracking for multiple underwater robots with certified safety by using recurrent neural network, IEEE Internet of Things Journal, 2026
[2] Deep hamming hashing integrating transformer and attention mechanism, IEEE Transactions on Emerging Topics in Computational Intelligence, 2026
[3] Adaptive noise rejection strategy for cooperative motion control of dual-arm robots, IEEE Robotics and Automation Letters, 2025
[4] New kinematic control scheme for redundant robotic manipulators perturbed by harmonic noise, IEEE Transactions on Industrial Electronics, 2025
[5] Design and validation of new acceleration-level repetitive motion planning scheme for omnidirectional mobile robotic manipulators, IEEE Internet of Things Journal, 2025
[6] GLAF-DETR: Detection transformer with global-local adaptive fusion attention for infrared maritime object detection, IEEE Internet of Things Journal, 2025
[7] Discrete-time zeroing neural network for time-dependent constrained nonlinear equation with application to dual-arm robot system, IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2025
[8] Harmonic noise rejection zeroing neural network for time dependent equality constrained quadratic program and its application to robot arms, IEEE Transactions on Industrial Informatics, 2025
[9] New fuzzy zeroing neural network with noise suppression capability for time-varying linear equation solving, Artificial Intelligence Review, 2025
[10] New discrete-time zeroing neural network for solving time-dependent linear equation with boundary constraint, Artificial Intelligence Review, 2024
[11] A new discrete-time repetitive motion planning scheme based on pseudoinverse formulation for redundant robot manipulators with joint constrains, Robotics and Autonomous Systems, 2024

